With the widespread recognition of parallel robots in various industries, in recent years, more and more companies have begun to increase the application of industrial robots in production lines. The industry areas and production line processes they cover have also shifted from the original relatively concentrated automobiles, food, pharmaceuticals, welding, etc., gradually extended to more categories. The performance of the parallel robot body is therefore challenged by more diverse process requirements. As an important industrial robot mechanism, parallel robots have many advantages such as small motion inertia, small floor area, small cumulative error, high control accuracy, and fast speed. In industries such as food, medicine, 3C electronics and printing that are more stringent in terms of production capacity improvement requirements, processing accuracy requirements, and sanitary conditions, parallel robots have become the best choice for rapid packaging, sorting, and transfer.
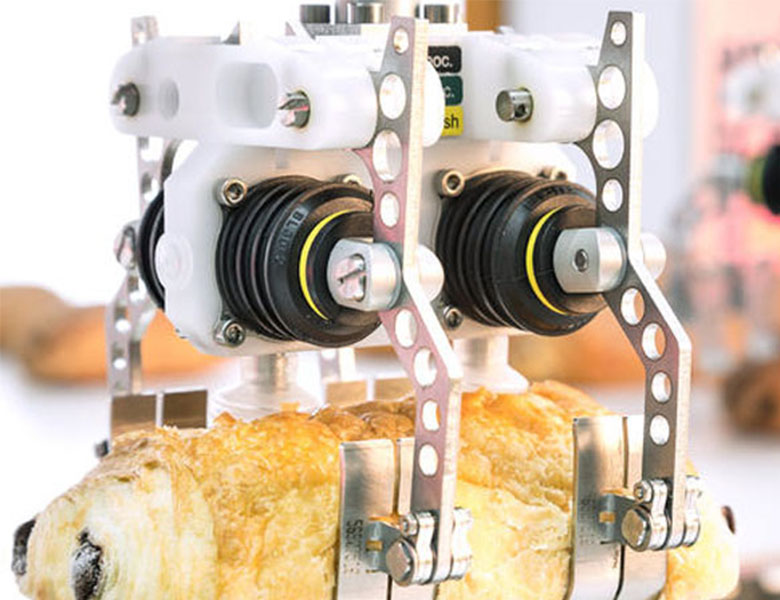
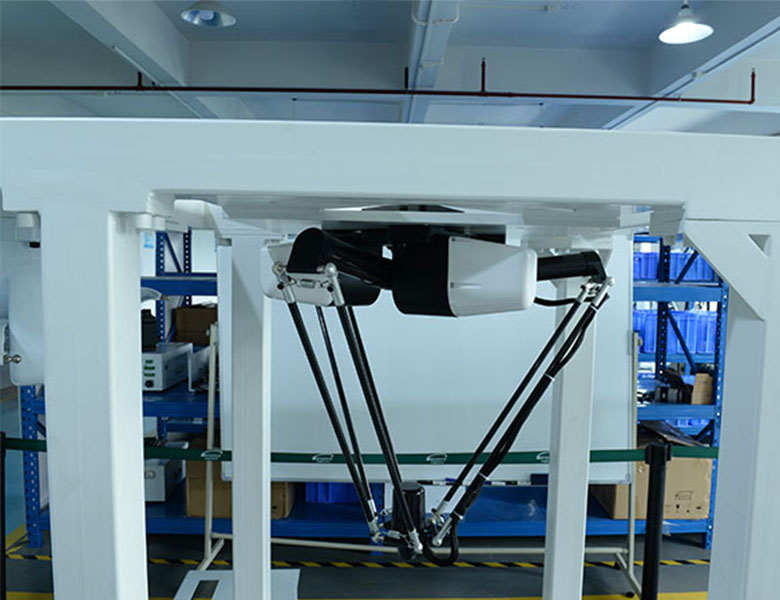
The mechanical structure of the parallel robot consists of a static platform, a driving arm, a driven arm, a moving platform and an intermediate shaft. Among them, the moving platform (also called the movable disk), which is an important part of the parallel robot, is the direct output mechanism for the parallel robot to realize the motion trajectory. The spatial range that the mobile platform can reach directly affects the path span during the terminal pick and place process, even the incoming material speed and the conveyor belt running speed. The design at the end of the intermediate shaft not only serves as a mechanism connecting the fixed plate and the rotating plate, but also directly affects the angle and accuracy during the rotation process. That is to say, when the parallel robot is completing a certain sorting and material sorting process, the larger the activity space of the mobile platform, the robot can grab and place materials in a larger range. If the incoming materials are in diverse positions, the rotation of the intermediate shaft is high, making it more flexible for handling items on the conveyor belt to rotate and picking and placing them under high-speed operation. In short, the stability and flexibility of the structure will directly determine the accuracy of the end motion and the functions the robot can achieve. In practical market applications, we often encounter customer requirements for large angles of end rotation, which is an important issue for parallel robots. Because the movable disk is restricted by the air pipe after installing the pneumatic device, the air pipe will be entangled during the rotation and the air pipe interface will become loose and fall off due to rotation. During the reciprocating process of high-speed picking, placing and rotating, the movable disk of the parallel robot further aggravates the winding, loosening and falling of the air pipe. Not only that, these problems exist at the same time, the air pipe wear is more serious. A series of inevitable problems occur frequently in the process of realizing flexible end operation of the movable disk. In actual production, it not only becomes a constraint on the rotation angle of the movable disk, but also becomes a concern for customers when choosing to use parallel robots. The movable disk with a rotatable gas path, the enclosed gas slip ring, was developed in 2017, which realizes any angle of rotation of the movable disk while ensuring the tightness of the gas path.
The enclosed air slip ring integrates the air path into the rotatable movable disk. Through structural transformation of the movable disk and the downward rotating turntable, the air path is integrated into the closed pneumatic device. The air path of the intermediate shaft enters the air inlet on the fixed disk, passes through the sealed space between the movable disk and the lower rotating disk, and is transmitted to the air outlet on the lower rotating disk. At the same time, the upper and lower ends of the sealed space are sealed by O-shaped sealing rings, realizing the connection of the air path, solving the problem that the rotation angle is limited by the air pipe when the existing movable disk is installed with a pneumatic device, reducing the influence of the air pipe winding on the large rotation angle of the movable disk, and increasing the flexibility of the movable disk. As industrial production continues to move towards intelligence, we firmly believe that parallel robots will become an indispensable and important role in the development of industrial robots due to their high-speed, high-precision, and flexible process characteristics.